Autonomous Driving in Unstructured Stochastic Intersections
ABOUT THE PROJECT
At a glance
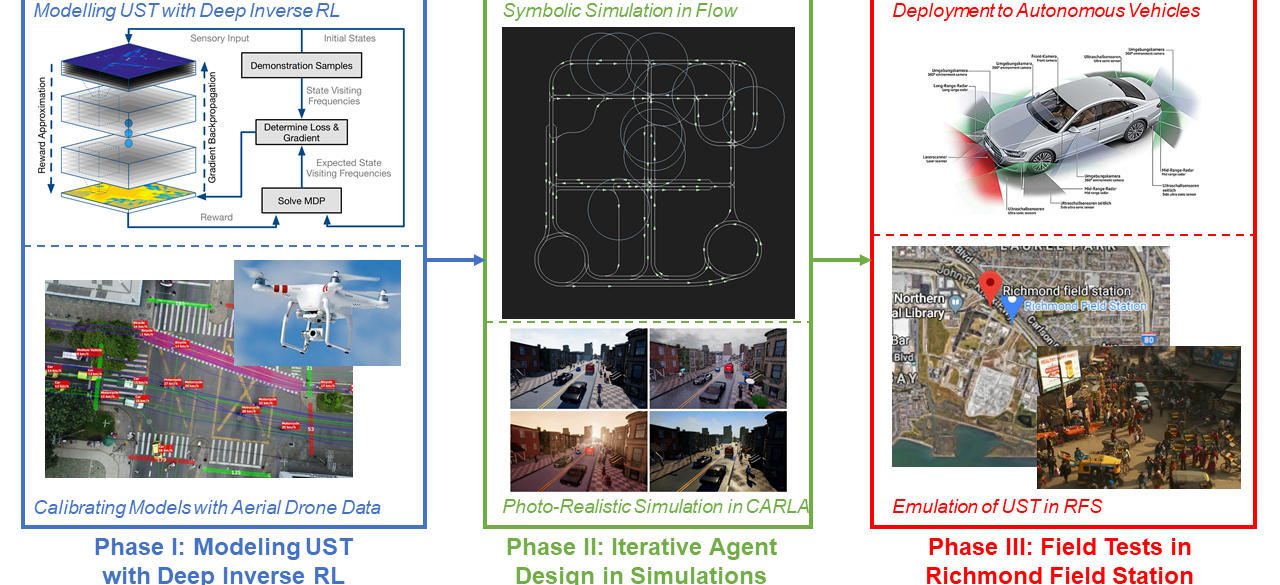
Current research on autonomous driving has primarily focused on navigation in well-structured road environments, in particular with compliance to driving directions. In these types of environments, roads are clearly partitioned into lanes and the right of way carefully shared by motorists. However, in remote rural areas, the road infrastructures are often unstructured without a clear definition of lanes. Moreover, in many developing countries, the traffic rules are often implicit, where the right of way is negotiated in real time through stochastic interactions among adjacent traffic participants. The complexity of such unstructured stochastic traffic poses a significant challenge to current autonomous driving systems. Some specific manufacturers go as far as advising their customers to not engage autopilot features in specific environments (which sometimes even include structured environments). In this project, we plan to model the microscopic behaviors of UST agents and to develop a safe and robust algorithm for navigation in UST by exploiting the state-of-the-art computer vision and reinforcement learning methods. We will develop our robotic system in CARLA (https://github.com/carla-simulator/carla), design our crowd navigation system in Flow (https://github.com/flow-project/flow) and Ray/RLlib (https://github.com/ray-project/ray), and finally validate the two systems jointly through field deployment at Richmond Field Station.
| principal investigators | researchers | themes |
|---|---|---|
| Alexandre Bayen Trevor Darrell | Fangyu Wu | Unstructured traffic intersections, Safe and robust navigation, Deep reinforcement learning, Trajectory prediction |