Online Automatic Construction and Update of HD Maps with Rich Semantics
ABOUT THIS PROJECT
At a glance
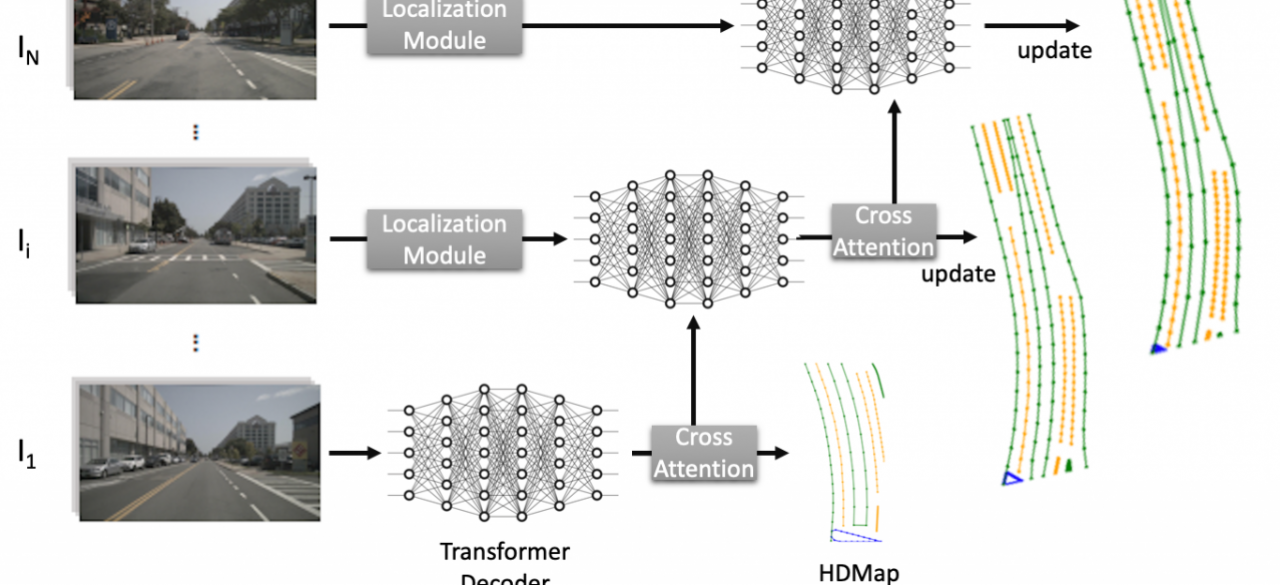
HD map is a key asset for autonomous driving, summarizing the static scenes with road geometry, topology and semantics. It is overwhelming to offline annotate a global HD map which can enable autonomy without geofence for mass production vehicles to be operated nationwide. Even if suppliers can provide HD maps partially covering the operating regions, the maps would still be inaccurate or outdated, and vehicles still need to rectify/update their online HD map construction capability. In this project, we will further extend our automatic HD map construction method [1] into an end-to-end fashion, enabling online map generation compatible with formats with rich semantics and parameterized representation such as OpenDRIVE.
| Principal investigators | researchers | themes |
|---|---|---|
| Mingyu Ding | HD map, automatic map generation, efficient model, scene understanding |