Searchable Database of Potential Crash Scenario Models for CARLA and the Corresponding Sensor Data Feeds
ABOUT THIS PROJECT
At a glance
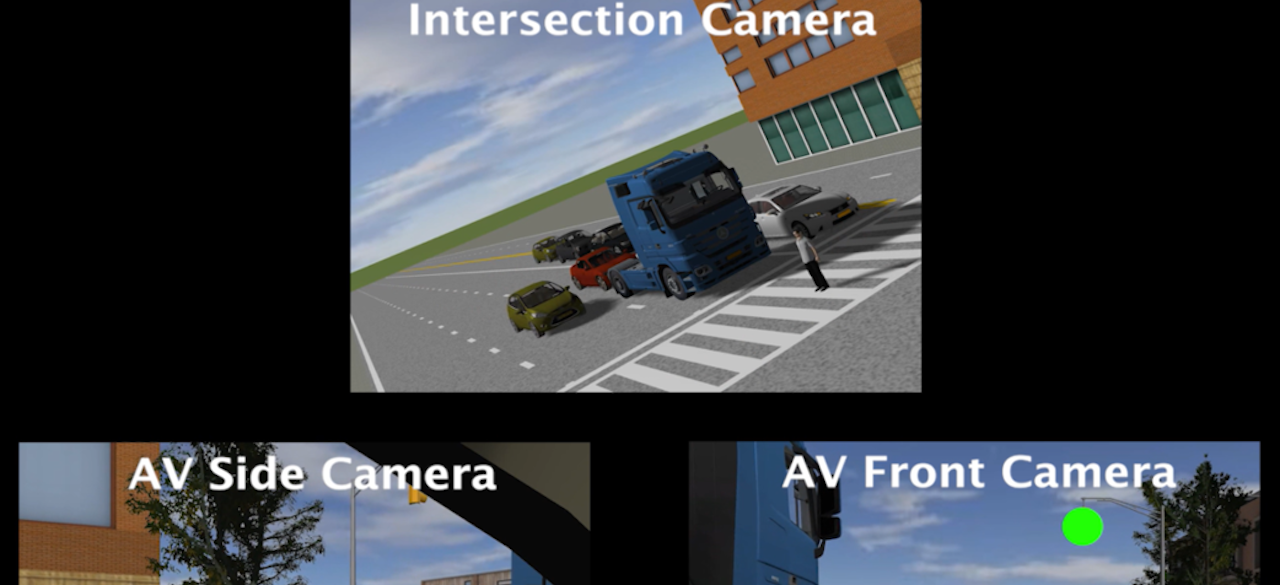
Our goal is to create a database of simulation models for CARLA simulator representing scenarios that potentially lead to crashes, classified by type and severity; and of the corresponding sensor data feeds coming from involved actors as well as from bystanders. These will be real-world scenarios in an urban setting with dense multimodal traffic environment provided in the OpenSCENARIO format, which can be imported into CARLA simulator. The database will be searchable by crash type, types of vehicles involved, and geographic locations.
Such a database will serve several purposes, including: 1) training of perception engines making them recognize dangerous situations from different points of view and using different sensors; 2) identifying the cause of the potential crash – violation, occlusion and “blind sensor”, or misinterpretation of other parties’ intentions; 3) computing parameter (e.g., speed, acceleration, deceleration) ranges, for which the collision in a given scenario is imminent – identifying the point of no return; 4) synthesizing contingency control for a given ego-vehicle that would try to prevent the collision, or if the collision is unavoidable, minimize its impact.
This project will produce: 1) Python implementation of the Scenario Generator (source code); 2) Online searchable database of OpenSCENARIO/ CARLA simulation models and related synthetic sensor measurements; 3) Methodology and examples of point of no return estimation and contingency control synthesis for an ego-vehicle.
| Principal investigators | researchers | themes |
|---|---|---|
| Crash analysis, Scenario synthesis, Simulation, verification, Backward reachability, Contingency control |