Advancing Vehicle Safety Assessment: A Scalable Safety Benchmark Integrating Probabilistic Motion Heatmaps Prediction for Autonomous Vehicles
ABOUT THIS PROJECT
At a glance
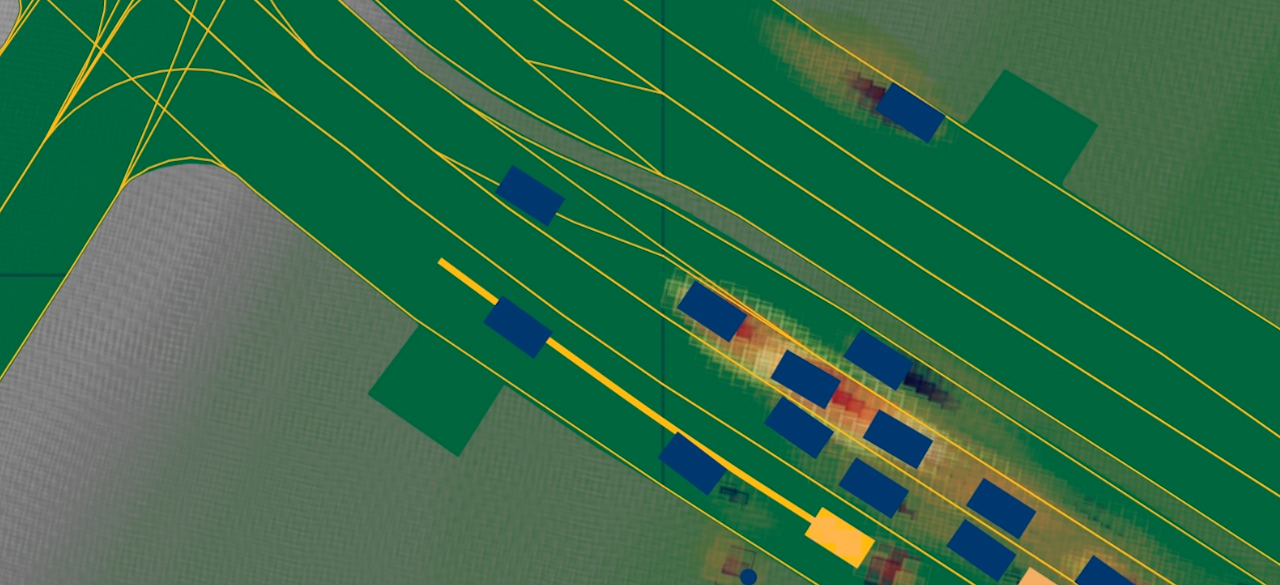
This proposal introduces an advanced vehicle safety assessment framework integrating probabilistic motion heatmap prediction for autonomous vehicles. It aims to solve the limitations of current deterministic models in predicting the stochastic nature of driving behaviors in mixed autonomy traffic, emphasizing the need for a more accurate assessment in scenarios involving autonomous and human-driven vehicles. The approach is grounded in a novel probabilistic motion heatmap method for vehicle trajectory prediction, enhancing the prediction and accuracy of safety evaluations. The proposed simulator features a modular architecture, integrating the motion heatmap predictor with traffic scenario generators and vehicle dynamics models. It focuses on generating diverse traffic scenarios, including urban commutes and highway interchanges, to assess the likelihood of crashes and the performance of autonomous vehicle algorithms. Utilizing the Monte Carlo method for safety evaluation, the simulator offers a comprehensive and robust analysis of safety risks.
| principal investigators | researchers | themes |
|---|---|---|
| Han Wang Yuneil Yeo | Safety Assessment, Autonomous Vehicles, Stochastic Motion Prediction |
This project is a continuation of completed project Collision Indeterminacy Prediction via Stochastic Trajectory Generation.