Autonomous Aerial Robots in Dense Urban Environments
ABOUT THE PROJECT
At a glance
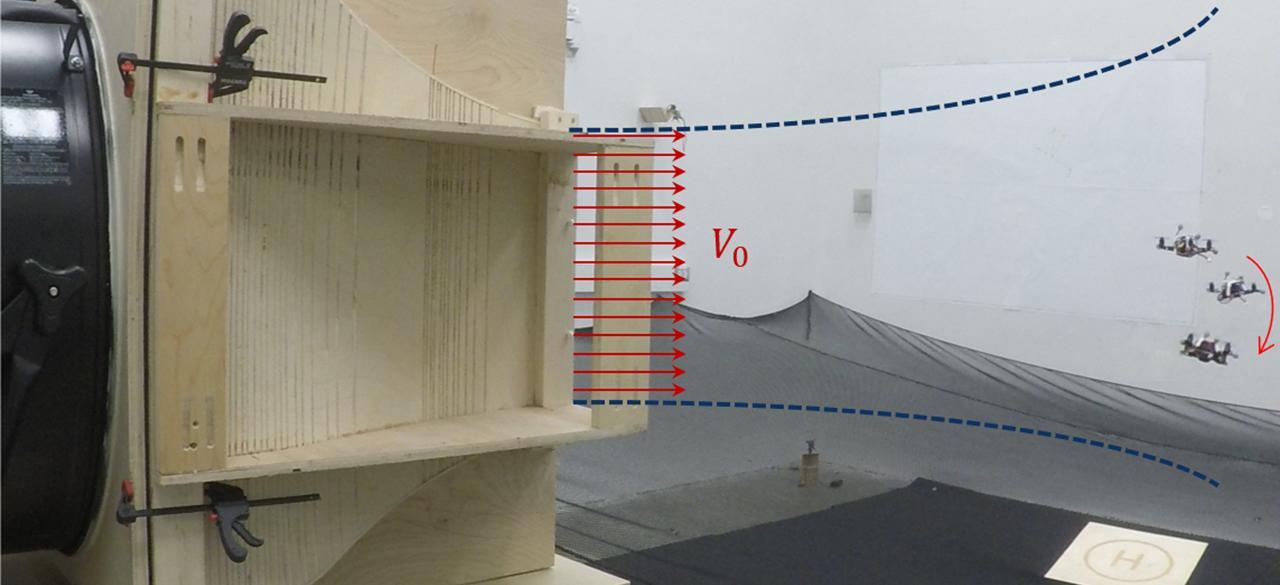
Aerial package delivery in complex, cluttered and aerodynamically uncertain urban canyons is of great essence due to rapidly increasing energy and time costs of transportation through urban road networks with ever increasing automotive traffic. The overarching goal of this project is to experimentally realize aerial package transportation through cluttered environments with complex aerodynamic interactions from building surfaces. In particular, by building on our prior work, we propose to develop motion plans for aerial robots through cluttered environments that are sensed visually, and experimentally implement our theoretical controllers that take into account aerodynamic interactions. Our approach fuses formal control with stability and safety guarantees with deep perception for estimating and flying through complex air flow fields.
| principal investigators | researchers | themes |
|---|---|---|
| Mark Mueller Koushil Sreenath | UAVs, Aerial Transportation, Robotics, Control, Learning |