Combining Deep Learning and Model Predictive Control for Low-Cost ECUs
ABOUT THE PROJECT
At a glance
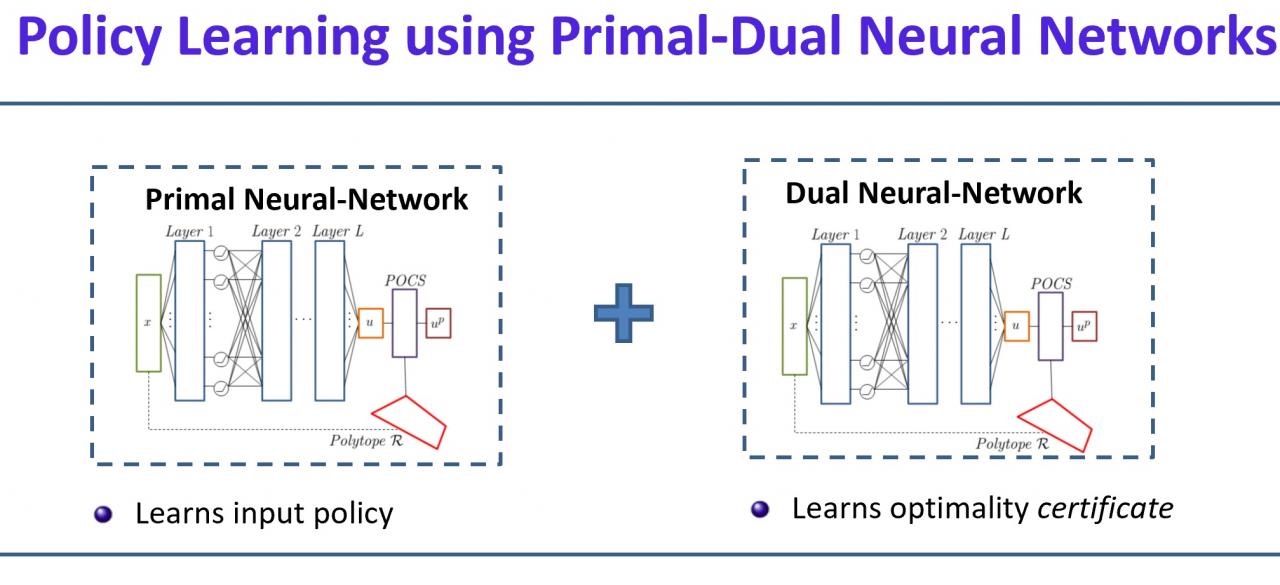
We are interested in developing real-time autonomous and automated driving algorithms that combine benefits of structured Deep Neural Networks (DNN) with well-established techniques of optimal control, specifically Model Predictive Control (MPC). Our goal is to combine the computational efficiency of DNNs with MPC’s ability to generate in a disciplined way control laws which satisfy state and input constraints. The project has two phases. In the first phase we study how to efficiently learn MPC policies with DNN. The objective of this phase is to obtain a DNN with the same (or similar) guarantees of the MPC policy while being an order of magnitude faster to evaluate. In the second phase we use the sparsity patterns of the DNN and the properties of the target embedded processor to generate a compressed DNN tailored to execute efficiently and in real-time on the specific vehicle Electronic Control Unit (ECU). In order to show the versatility of the approach we will verify compression rates and performance on a variety of MPC problems and production ECUs.
| principal investigators | researchers | themes |
|---|---|---|
| Francesco Borrelli Vladimir Stojanovic | safe machine learning for autonomous driving, structured deep neural networks, learning model predictive control, mixed control architectures, real-time hardware acceleration |