Energy-Efficient Deep Neural Nets for Occupancy-Grid Mapping
ABOUT THE PROJECT
At a glance
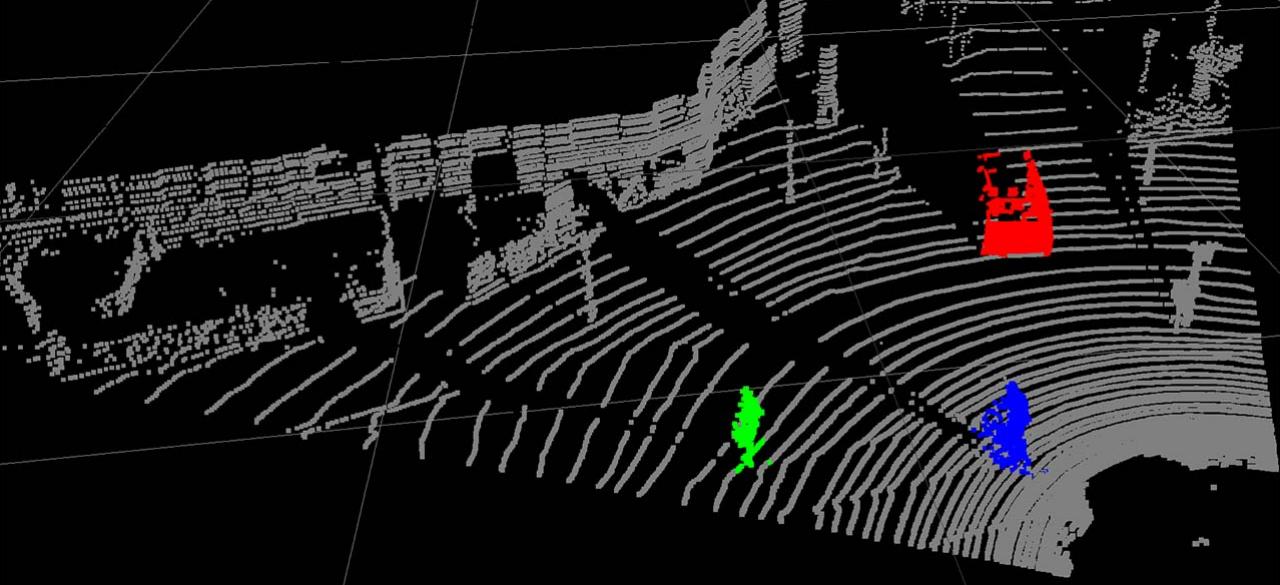
We believe that perception algorithms for autonomous driving should not only accurately detect objects in the environment of an ego-car, but also, generate meaningful representations of the environment that are directly useful for motion-planning and control applications in ADAS systems. By this standard, traditional computer vision tasks such as object classification and object detection in simple 2D images are not well suited for autonomous driving. In this project, we seek to address this problem by designing algorithms that produce grid-occupancy maps with future motion estimation. Such representation is already widely adopted by the control community for the reason that it provides compact but adequate information for planners and controllers. Besides providing accurate grid-occupancy map, we will also focus on reducing latency and power consumption of our algorithm to satisfy the speed and power constraint of embedded processors on autonomous vehicles.
| principal investigators | researchers | themes |
|---|---|---|
| Kurt Keutzer | Bichen Wu | Computer Vision Embedded Processing Sensor Fusion |