Intelligent Intersection
ABOUT THE PROJECT
At a glance
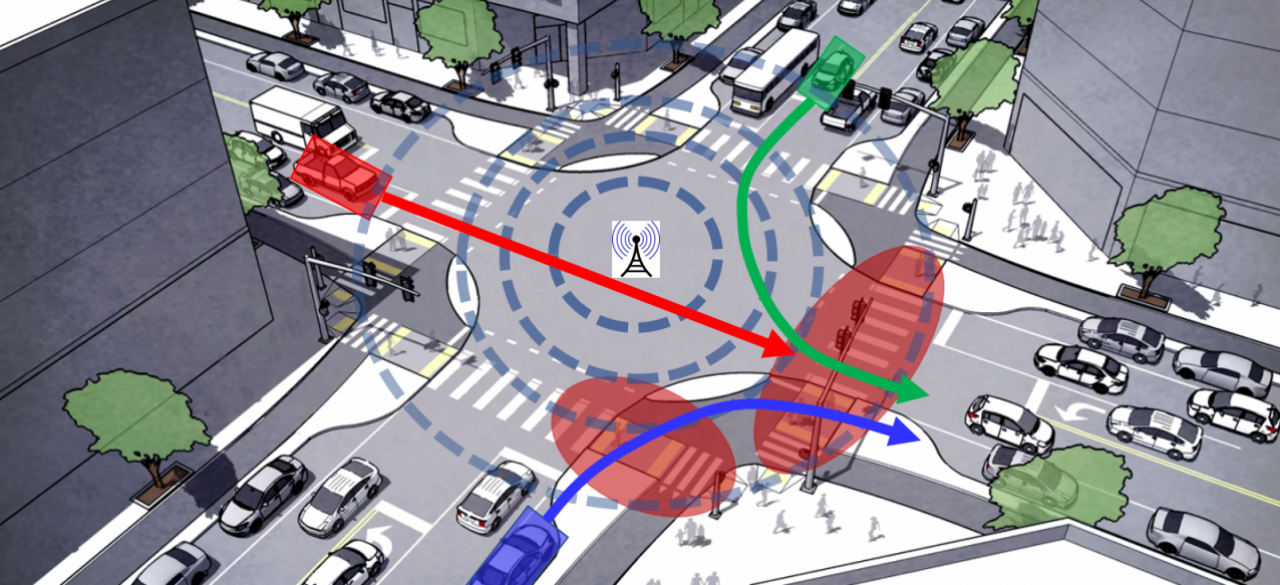
Intersections present a very demanding environment for highly autonomous vehicles (HAVs). Challenges arise from more complex vehicle trajectories; absence of lane markings to guide vehicles; split phases that prevent determining who has the right of way; invisible vehicle approaches; illegal movements; simultaneous interactions among pedestrians, bicycles and vehicles. It is often the case that on-board sensing equipment is not sufficient enough for HAV’s decision support system to steer the vehicle through an intersection safely and efficiently.
In this project, we classify intersections by complexity of design, operations and traffic. Heterogeneity of intersections, hazardous conditions can vary significantly, and there is no generally accepted definition of “complexity” of intersections. We also specify conditions that can be improved by infrastructure-to-vehicle (I2V) technology for each intersection class. Then, we use infrastructure sensing to improve HAV’s awareness about real-time dynamics at the intersection. Such augmentation of HAV’s perception of the state of intersection leads to a safer and more efficient operation of the HAV.
We develop algorithms that take infrastructure sensor data and trigger warnings about potential conflicts, or, on the contrary, inform HAV that it is safe to proceed. These algorithms utilize eclectic data sources: in-pavement sensors, micro-radars, current and future traffic signal information, and on-board sensing equipment. To discover how much infrastructure sensing is necessary for safe and efficient HAV operation, we develop algorithms that use different combinations of infrastructure sensors. We test these algorithms against normal and hazardous intersection scenarios, and quantify the safety-efficiency trade-offs.
The information about the intersection dynamics resulting from processed infrastructure sensor and signal phase data is encoded into SAE J2735 messages and broadcasted by the roadside equipment. These messages can be received and used by HAVs, as well as by all connected vehicles able to communicate with roadside infrastructure.
| principal investigators | researchers | themes |
|---|---|---|
| Pravin Varaiya | Offer Grembek Alex Kurzhanskiy Aditya Medury Mengqiao Yu | Infrastructure sensing Infrastructure-to-vehicle (I2V) technology Sensor data fusion Intersection safety |