Intention-aware Pedestrian Motion Modeling and Prediction
ABOUT THE PROJECT
At a glance
Pedestrian motion modeling is an active research topic and useful in many applications, such as surveillance system, pedestrian tracking, vehicle motion planning, city planning, urban design, evacuation planning, etc. Recently, researchers have proposed deep-learning-based models, which are trained by pedestrian trajectory datasets. By taking advantage of expressivity of the deep neural networks, these models are good at capturing the latent pedestrian dynamics and approximating the pedestrian motion. While these models relax the complexity of processing suitable features and building the model manually, it is hard to comprehend the intention behind the decision made by the pedestrians and the prediction made by the model. These shortcomings in describing models motivate us to pursue a model to achieve interpretability without compromising the expressivity.
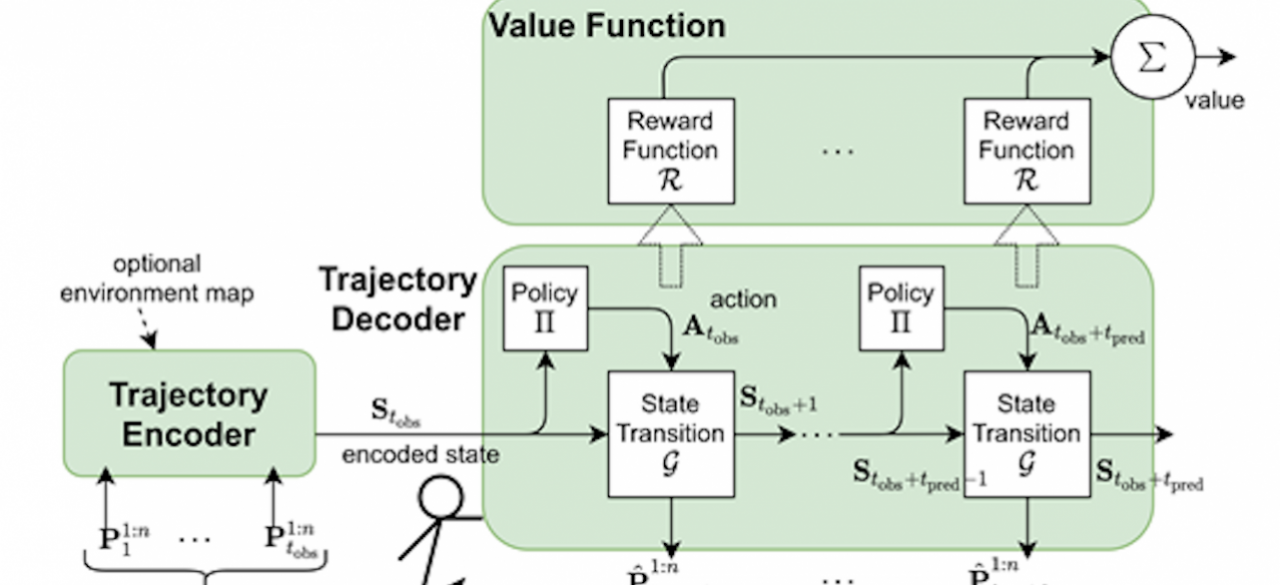
We propose a model that combines the advantages of interpretability in traditional models as well as the generalizability of the deep learning model, to predict agent trajectories by considering the historic trajectories, social interactions, and physical environment. Furthermore, this model provides insights for the model user to comprehend how the model works. The model utilizes the attention [9] mechanism to compute how much attention is given by the model regarding other agents and objects in the surrendering environment for every pedestrian in the scene. The attention mechanism provides a way to understand how the model computes the prediction by looking at what the model is currently focusing on. Additionally, the model also comes with a reward function for grasping the intention of the agents represented in the model, thus named intention aware.
| principal investigators | researchers | themes |
|---|---|---|
| Ching-Yao Chan | Pedestrian trajectory prediction, Intention aware modeling, machine learning |