Real World Traffic Smoothing Demonstration with Deep-RL Trained CAVs
ABOUT THE PROJECT
At a Glance
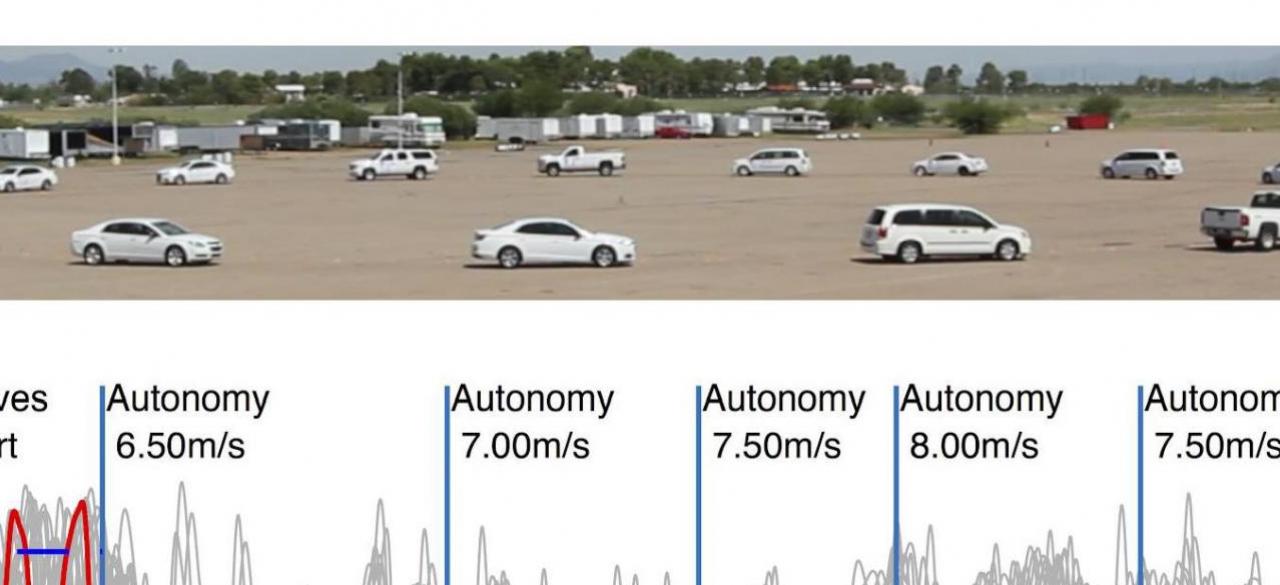
Leveraging our developmental work in FLOW, we have demonstrated in simulation the application of deep-RL to smooth unstable traffic waves. As this work continues, we propose to transfer policies learned in software to a field demonstrations using CAVs in live traffic. We will develop and demonstrate AI and control algorithms that smooth traffic flow in stop and go traffic conditions capable of providing ≥10% energy savings. Towards this end, we will: (1) develop new techniques in multi-agent RL, (2) build sensing infrastructure and technology to quantitatively measure impacts, (3) develop, calibrate, and validate energy models for vehicles, and (4) develop control algorithms to transfer learned policies to CAVs. The personnel funding will mostly be provided by NSF and US DOE grants, and this proposal requests the funding to jumpstart our CAV supply by purchasing two GM vehicles. This specific request to fund hardware is done at the request of GM, as part of ongoing discussions with them.
| PRINCIPAL INVESTIGATORS | RESEARCHERS | THEMES |
|---|---|---|
| Jonathan Lee Yashar Farid Eugene Vinitsky Abdul Kreidieh Kathy Jang Fangyu Wu | Advanced machine learning for intelligent autonomy, Functionality and applications for automated driving |