Safe and Effective Perception and Control through Formal Simulation
ABOUT THIS PROJECT
At a glance
Neural networks (NNs) have achieved impressive accuracy in various perception tasks, e.g. object detection, segmentation, and are being incorporated into autonomous vehicle (AV) technology where accuracy and robustness of the NNs are of utmost importance. A central question is: How can we verify the safe operation of an NN based AV system at scale, leveraging the results for training and improving datasets, and improving safety of the overall closed-loop autonomous vehicle system?
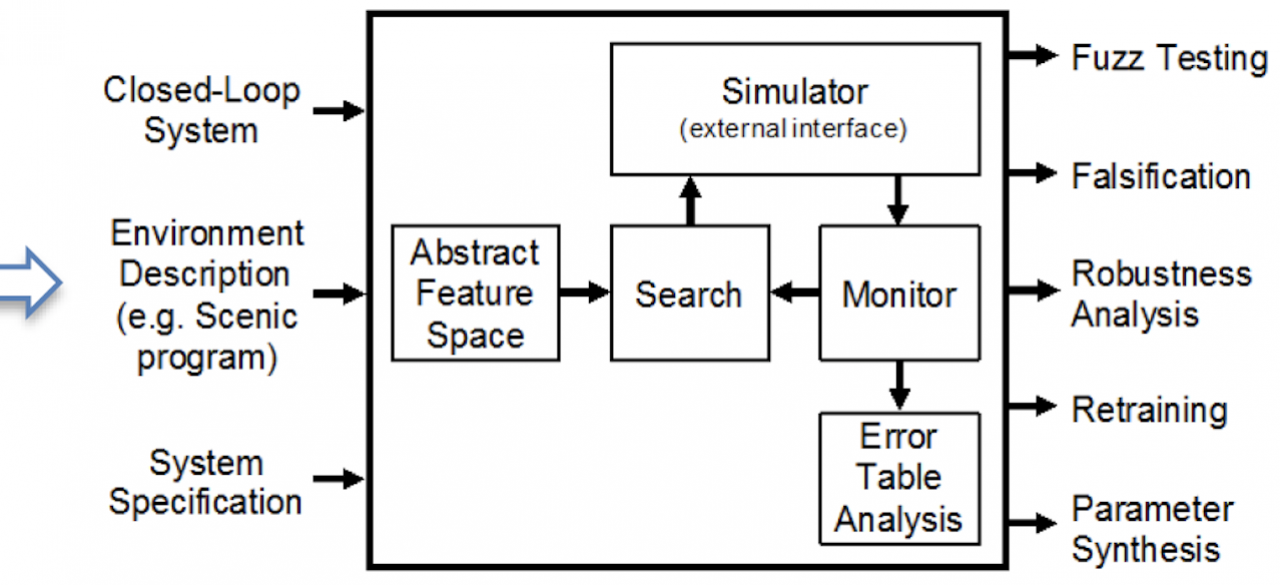
We plan to continue our research on leveraging simulation environments that are now getting more attention in the autonomous driving, computer vision (CV) and machine learning (ML) communities. Most of the work on simulation environments is on creating a realistic environment that can produce large amounts of training data. Our focus is to use existing simulation environments more effectively for safe and accurate learning by using formal methods -- an approach we term formal simulation.
This project builds on results from the project "Safe and Effective Learning and Control through Formal Simulation".
| PRINCIPAL INVESTIGATORS | RESEARCHERS | THEMES |
|---|---|---|
| Sanjit A. Seshia | deep neural networks, simulation, verification, control, training, testing, data generation, adversarial analysis |