Visual Landmarks for Long Range Semantic Navigation
ABOUT THIS PROJECT
At a glance
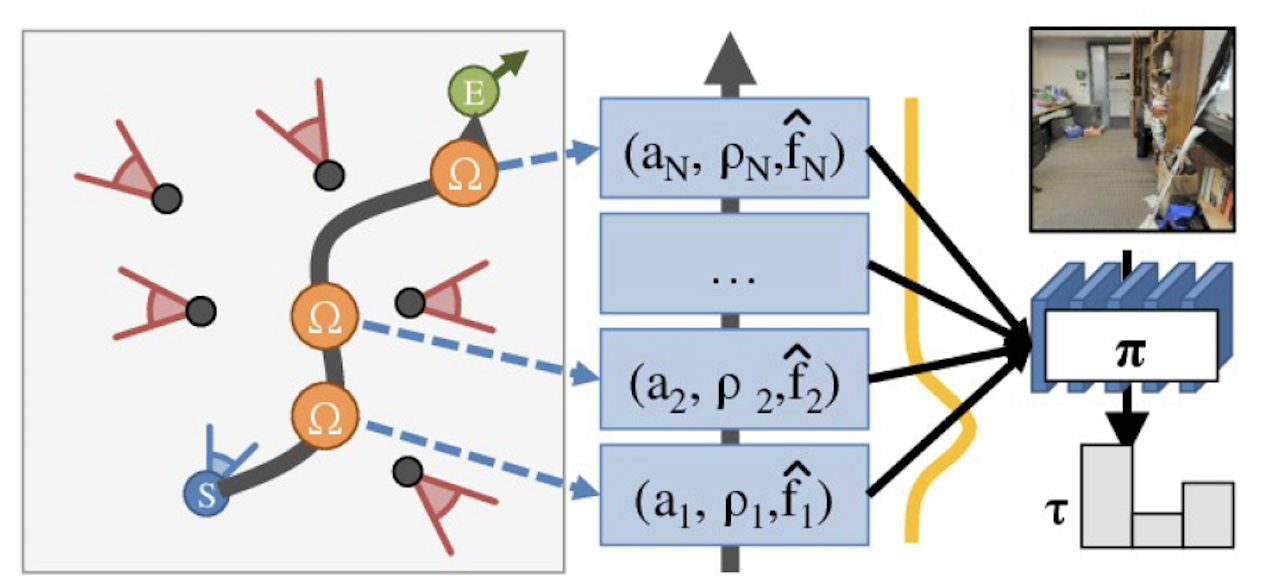
Humans demonstrate a remarkable ability to navigate through environments. In particular, when they first encounter an unseen environment, they draw on previous experiences in similar conditions to plan paths within this environment. However, on repeated exposure to the environment, they seem to seamlessly plan and navigate their way to their goal. This is also true of areas which they might have visited only a few times, or an area they visit after a very long time. They store a mental map of a large number of floors simultaneously which they can efficiently use when they encounter the floor again. We plan to replicate this ability to store spatial maps efficiently in artificial agents. In particular, we plan to use sparse visual landmarks to represent an entire floor as opposed to a dense map which is what most learning and classical methods use. We believe this will have two advantages -- 1) the compression of space will allow a single agent to remember several floor maps simultaneously and use them when necessary, 2) It will make the agent robustness to visual changes to an environment since the map we construct through visual landmarks would already omit several unnecessary details.
| PRINCIPAL INVESTIGATORS | RESEARCHERS | THEMES |
|---|---|---|
| Jitendra Malik | Ashish Kumar | Long Range Navigation, Semantic Navigation, Visual Landmarks |