Which Intersections Need I2V and When?
ABOUT THE PROJECT
At a glance
Intersections present a demanding environment for autonomous vehicles (AV). Challenges arise from interactions among pedestrians, bicycles and vehicles; complex vehicle trajectories; absence of lane markings to guide vehicles; split phases that prevent determining who has the right of way; invisible vehicle approaches; and illegal movements. AV safety rests on the proposition that if a vehicle can identify the objects in its field of view and predict how each object will behave, it can safely drive itself.1 However, there are scenarios in which additional information about the traffic environment (including phase prediction and location of hidden objects) would benefit the vehicles’ tracking and control algorithms.2,3 This information may be obtained from the intersection controller and from sensors in the intersection that detect objects, and transmitted to connected vehicles (CV) and AVs by I2V technology.
Proposed work
To help answer these questions, we propose a simulation based toolbox that will perform quantitative evaluation of effectiveness of an I2V system at a given intersection. I2V effectiveness will be quantified in terms of mobility and safety performance measures by comparing “with I2V” and “without I2V” simulation scenarios. Mobility performance measures include intersection throughput, number of stops of individual vehicles during intersection crossing and time needed for intersection crossing. Safety performance measures include number of emergency stops (simulated collisions), number of near misses, and number of vehicles not properly yielding to pedestrians. This simulation toolbox will be built around PreScan5, which allows to create vehicles with various on-board sensing configurations to be used in the vehicle’s feedback control and, thus, evaluate quality and usefulness of each of the sensor groups. Figure 1
shows the diagram of the proposed system. The main parts to be implemented are the intersection infrastructure model and the signal model allowing actuated green phase extension.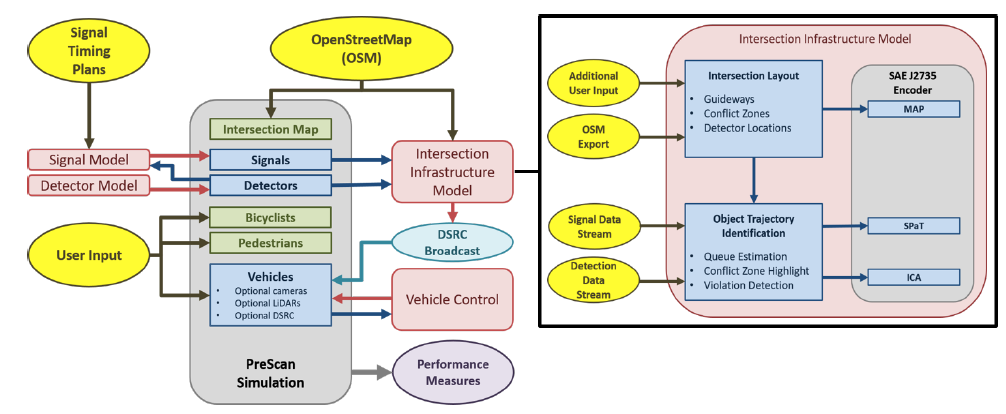
Figure 1 Simulation system diagram - general view (left) and details of the intersection infrastructure model (right).
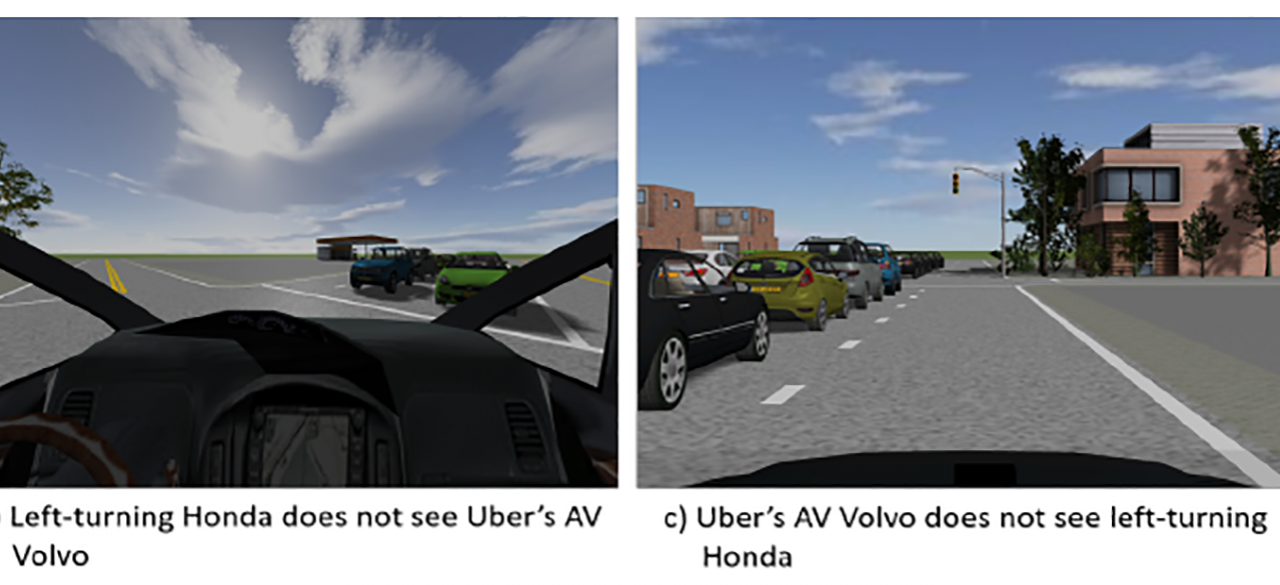
We already use PreScan to demonstrate the need for detection in blind zones at intersections. Figure 2 presents a screenshot of the PreScan simulation of the collision scenario involving Uber’s AV Volvo in Tempe, AZ in March 2017.6 Our next step is to evaluate the efficiency of detection and I2V in PreScan and see how information about road user activity in blind zones (as opposed to just informing about existence of such zones) improves AV’s and intersection’s operation.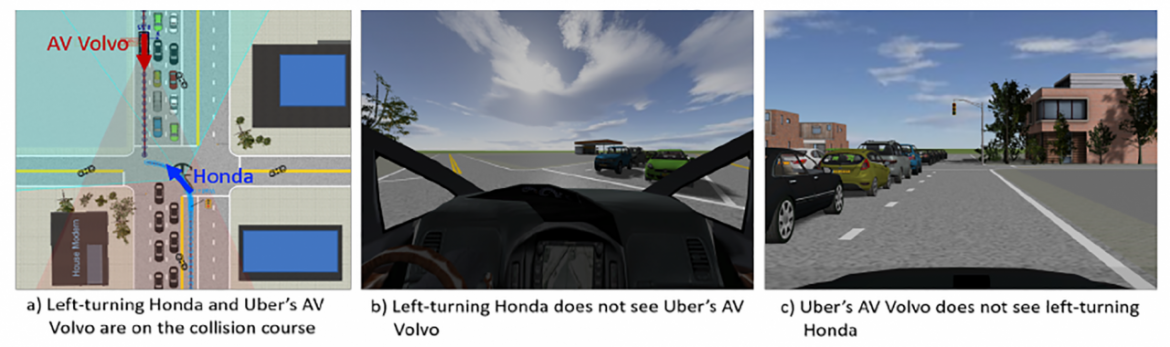
Figure 2 PreScan simulation of Uber's AV collision at the intersection in Tempe, AZ.
| principal investigators | researchers | themes |
|---|---|---|
| Pravin Varaiya | I2V, Augmenting AV information, Smart Intersection |