Jump to navigation
Enter your keywords
Main menu
About
Projects
Researchers
Sponsors
Researcher John Canny
Researcher Biography
http://www.eecs.berkeley.edu/Faculty/Homepages/canny.html
Past Projects
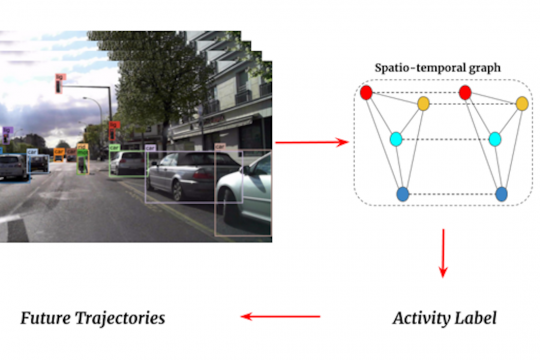
Scene Understanding and Forecasting in Contextual Environment – From Pixel to Semantic
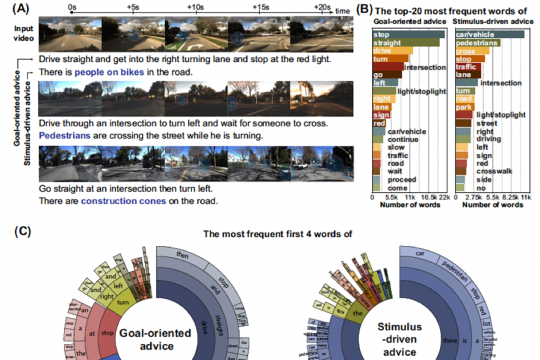
Advisable Deep Driving
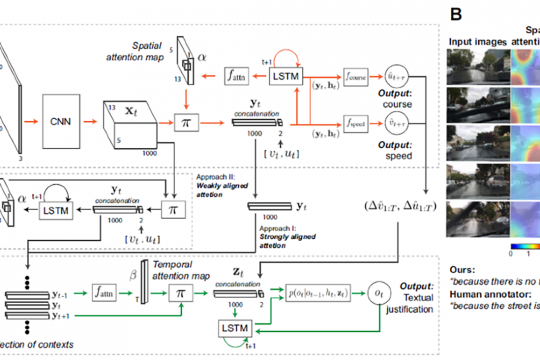
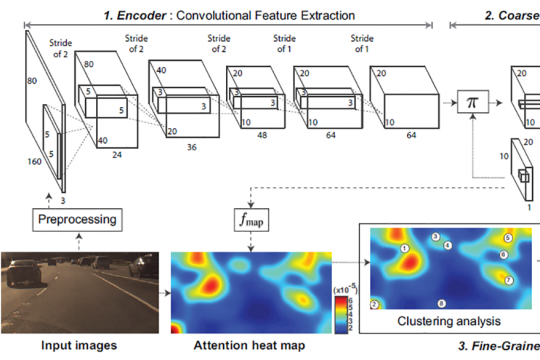
Explainable Deep Vehicle Control
Risk-Averse, Adversarial Reinforcement Learning
Explainable Deep Vehicle Control and User-Defined Constraints
Low Latency Deep Inference for Self-Driving Vehicles