Jump to navigation
Enter your keywords
Main menu
About
Projects
Researchers
Sponsors
Researcher Trevor Darrell
Researcher Biography
http://www.eecs.berkeley.edu/Faculty/Homepages/darrell.html
Past Projects
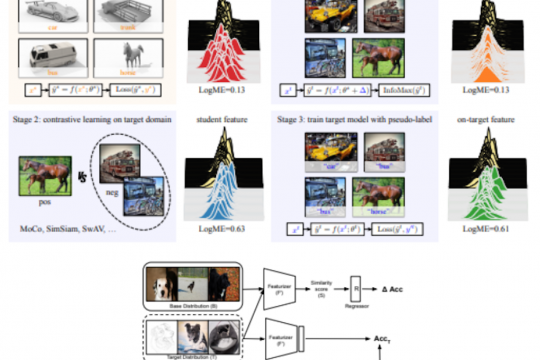
Simultaneous On-Target Domain Adaptation and Performance Prediction
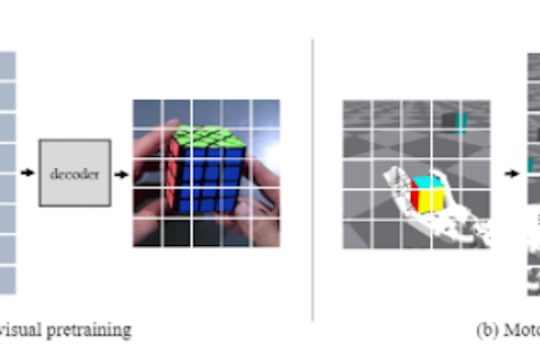
Self-supervised Visual Pre-training for Motor Control
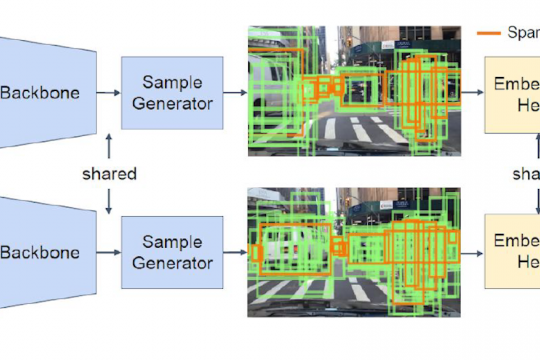
Similarity Learning for Multiple Object Tracking
BDD 100K and Beyond Data Labeling Efforts
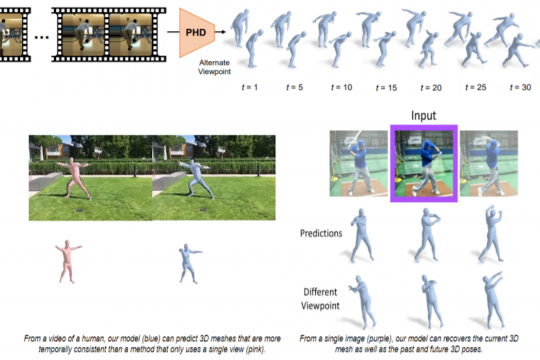
Predicting Pedestrian Behavior from 3D Cues
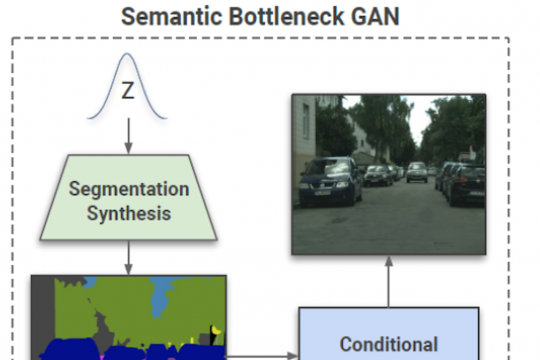
Domain Adaptation with Scene Structure
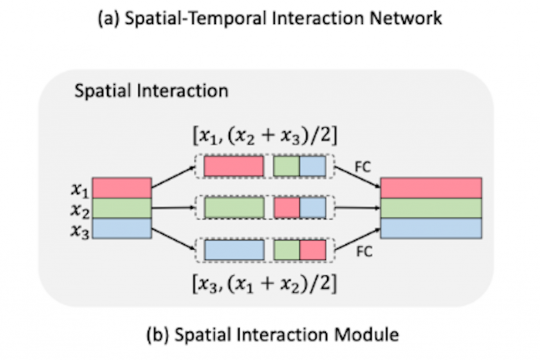
Object-centric Spatial-Temporal Interaction Networks for Rare Event Recognition
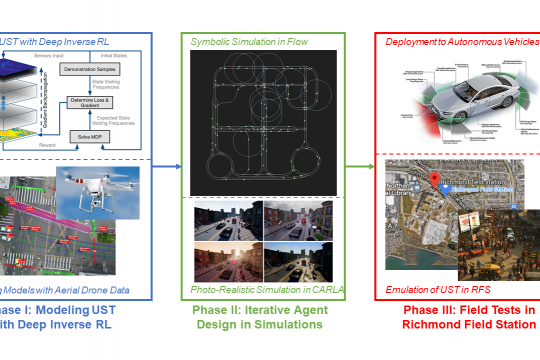
Autonomous Driving in Unstructured Stochastic Intersections
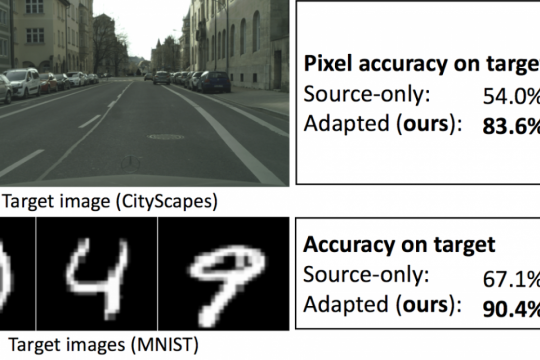
CyCADA: Cycle Consistent Adversarial Domain Adaptation
Public-Road Demonstration of the BDD/HCE Autonomous Driving Car
Combining Deep Learning and Model Predictive Control for Safe, Effective Autonomous Driving
Robust Visual Understanding in Adversarial Environments
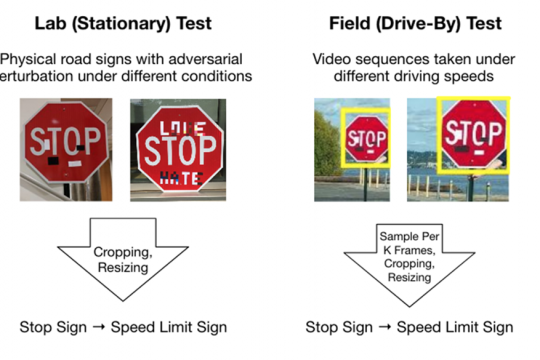
Adversarial Deep Learning for Autonomous Driving
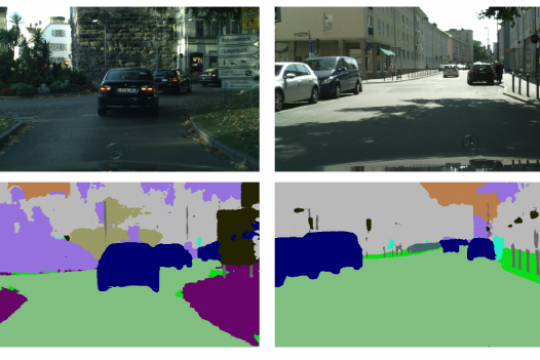
Fast Simultaneous Object Detection and Segmentation
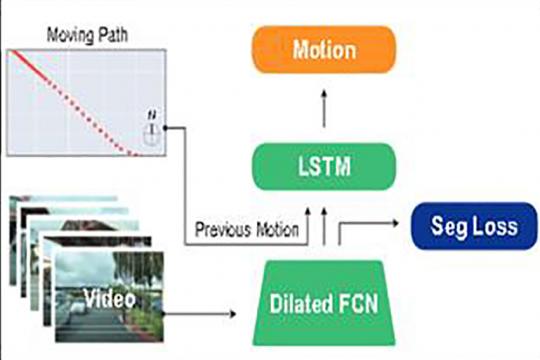
Clockwork FCNs for Fast Video Processing
Cross-modal Transfer Learning