Jump to navigation
Enter your keywords
Main menu
About
Projects
Researchers
Sponsors
Researcher Masayoshi Tomizuka
Researcher Biography
http://www.me.berkeley.edu/people/faculty/masayoshi-tomizuka
Current Projects
Stimulate Reasoning Abilities of LLM in Interactive Prediction and Planning
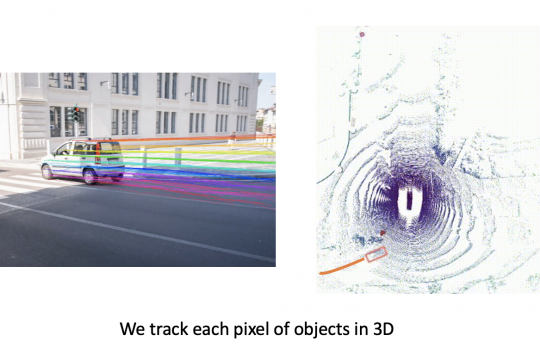
Tracking Anyone and Anycar for 3D Auto-Labeling from Video Inputs
A Unified Generative Framework for 3D Driving Scenarios
Integrated Fine-Grained 3D Reconstruction and Narrow-Space Planning for Autonomous Parking
Truckload Optimization via Task Planning based on Deep Reinforcement Learning
Past Projects
3D Object Detection Enhanced by Temporal Multi-View Input
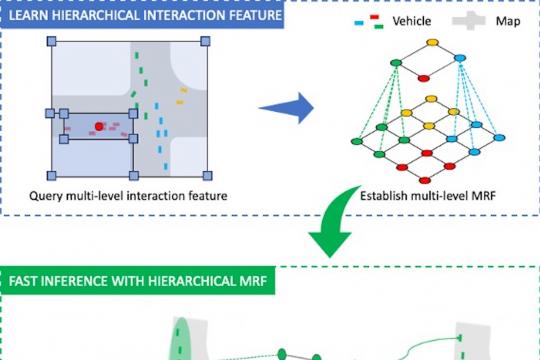
Efficient and Consistent Joint Multi-Agent Prediction for Interactive Planning
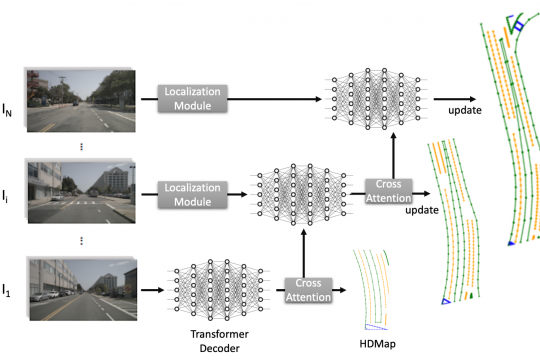
Online Automatic Construction and Update of HD Maps with Rich Semantics
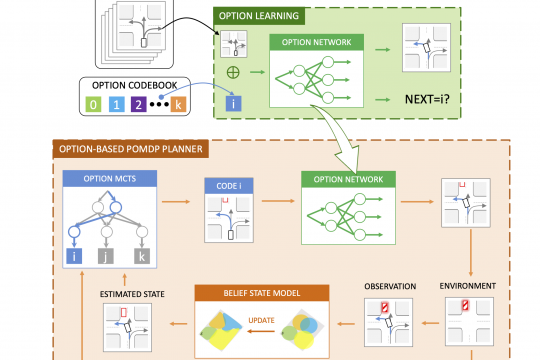
Computationally Efficient Option-based Monte Carlo Planning for POMDP
Multi-Modal Self-Supervised Pre-training for Label-Efficient 3D Perception
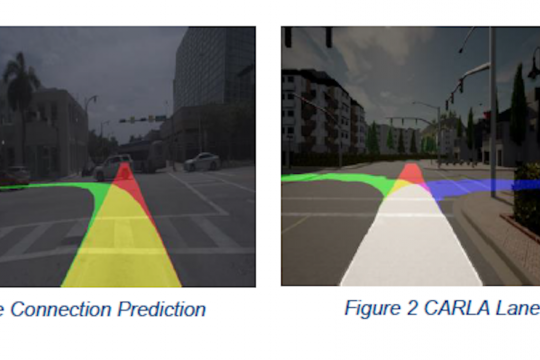
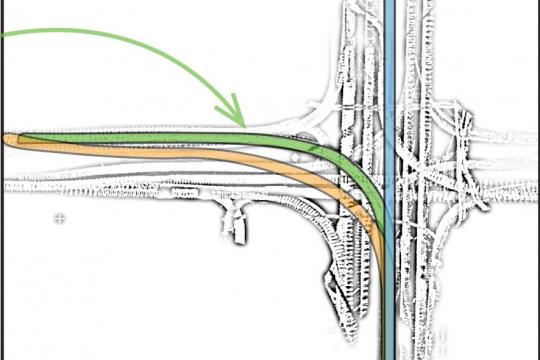
Automatic Inference of Lane Topology and Connecting Geometry for Scene Understanding, High-Definition Map Construction and Representation
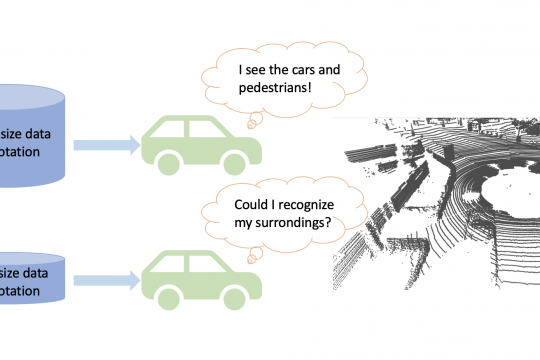
Data Efficiency for Point Cloud Perception Model
Embracing Uncertainties in 3D Object Detection -- from Annotation and Benchmarking to Failure Analysis and Data Augmentation
Automatic Semantics Extraction and Representation for High-Definition Map Construction and Scene Understanding
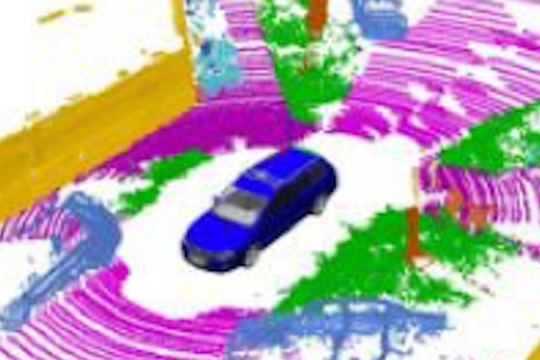
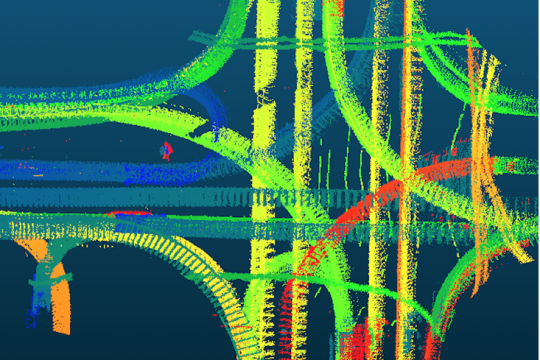
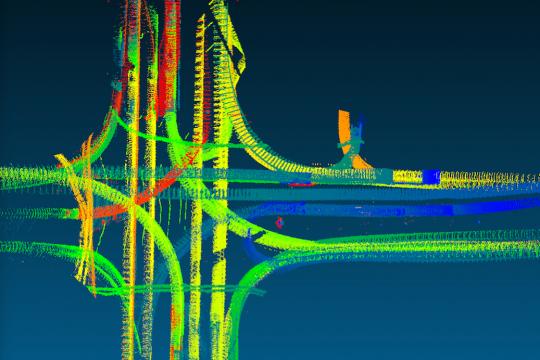
Efficient Model for Large-Scale Point Cloud Perception
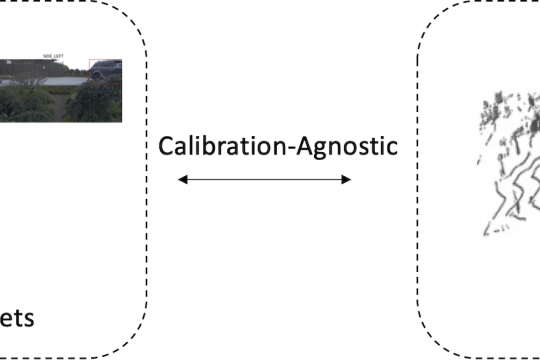
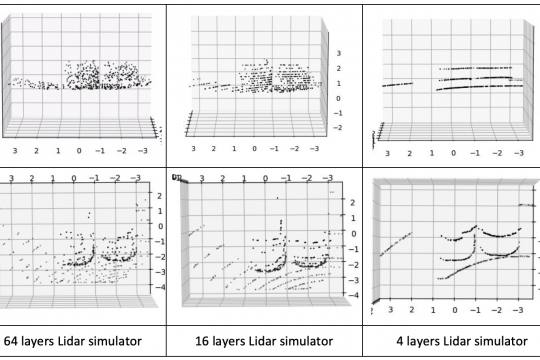
Data Augmentation via Synthetic Point Cloud for 3D Detection Refinement and Domain Adaptation with Different LiDAR Configurations
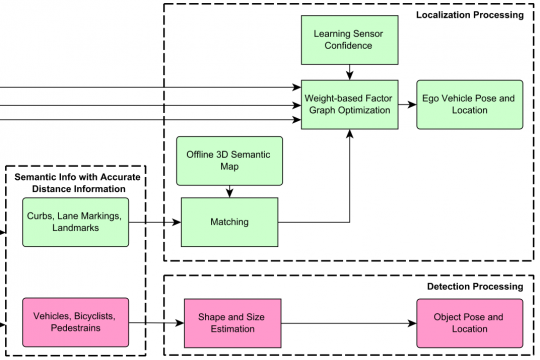
Localization and 3D Detection via Fusing Sparse Point Cloud and Information from Visual-Inertial Navigation System
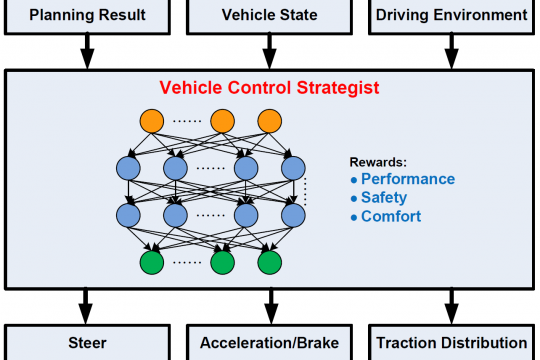
Deep Learning-Based Vehicle Control Strategist for Autonomous Vehicles
Time-Series LIDAR and Camera Fusion with Structured Variational Inference
Interpretable and Data-Efficient Driving Behavior Generation via Deep Generative Probabilistic and Logic Models
Fast Inverse Vehicle Dynamics Adaptation for Driving Policy Transfer via Meta Learning
Generic Motion Generation and Comprehension with Social Interactions
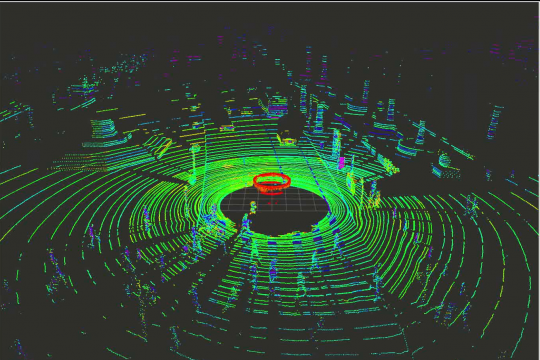
3D Object Detection based on Lidar and Camera Fusion
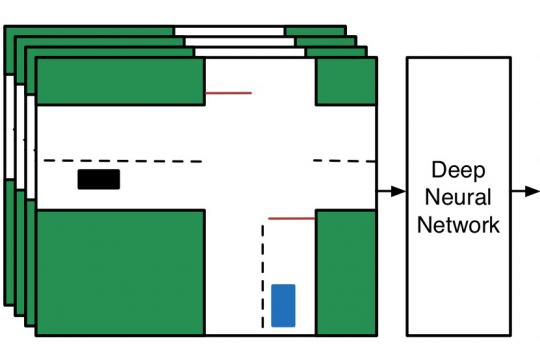
Motion Prediction for Urban Autonomous Driving Based on Stochastic Policy Learned via Deep Neural Network