Jump to navigation
Enter your keywords
Main menu
About
Projects
Researchers
Sponsors
Researcher Ching-Yao Chan
Researcher Biography
http://path.berkeley.edu/people/staff-directory/ching-yao-chan
Past Projects
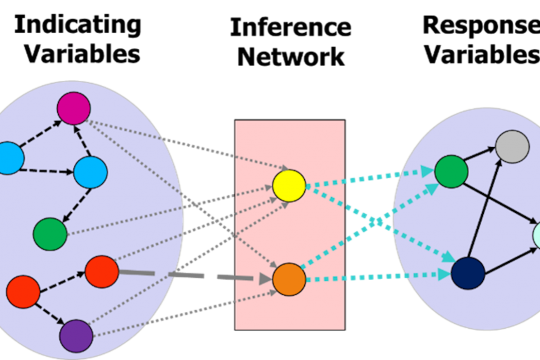
Intention-aware Pedestrian Motion Modeling and Prediction
Safety Evaluation of Automated Driving Systems
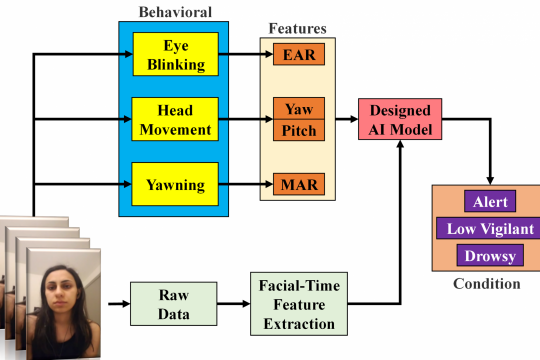
Driver Drowsiness Analysis Based on Multiple Facial Features
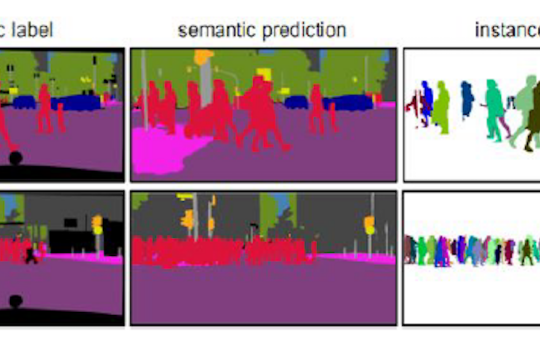
Representation Learning for Person Segmentation and Tracking
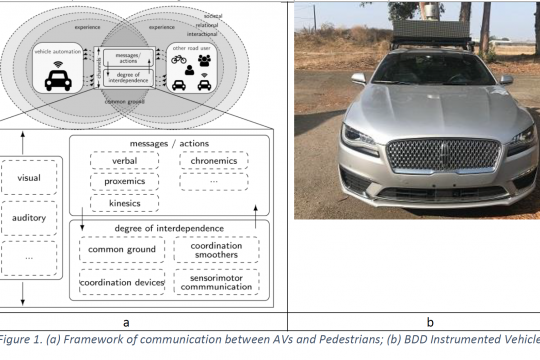
Implicit Communication of Automated Vehicles: Using Vehicle Movement Cues for Coordination with Pedestrians at Intersections
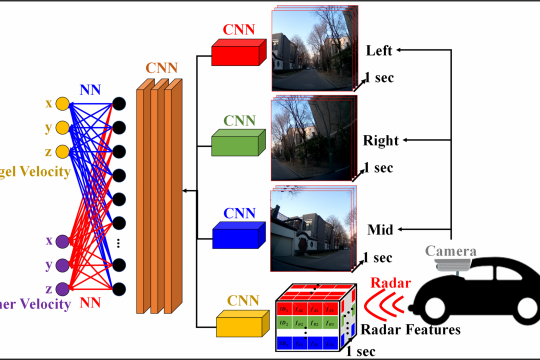
Vehicle Dynamic Estimation based on Image Sensor & Radar Fusion
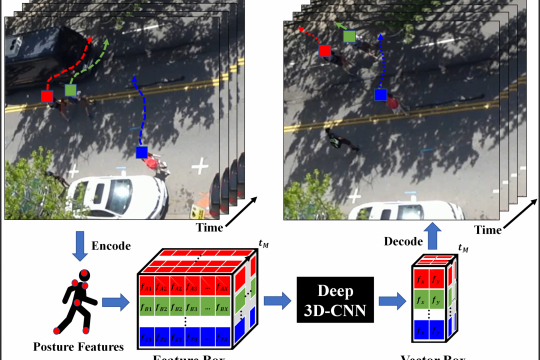
Pedestrian Trajectory Prediction Combining Posture and Social Features
Infrastructure, Data, and Related Research
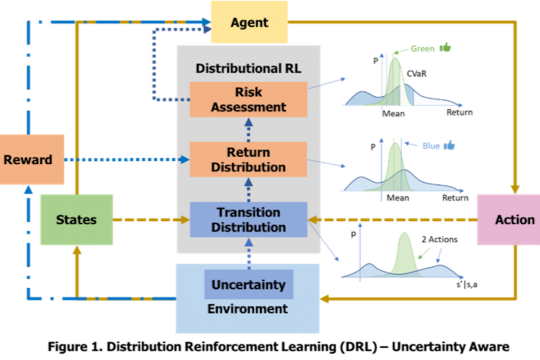
Uncertainty-Aware Reinforcement Learning for Interaction-Intensive Driving Tasks
Scene Understanding and Forecasting in Contextual Environment – From Pixel to Semantic
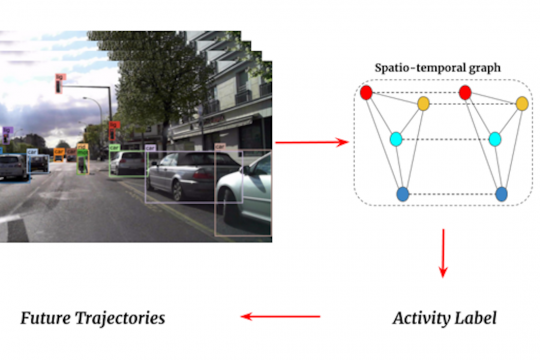
Agent Behavior Understanding in Crowds – Predicting Future Trajectories and Activities
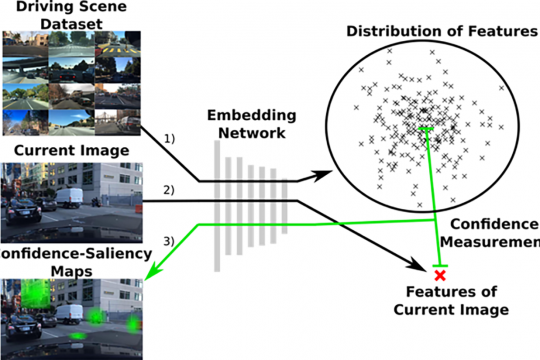
Pixel-Level Confidence Prediction for Interpretable Network-Based Driving (ConfPix)
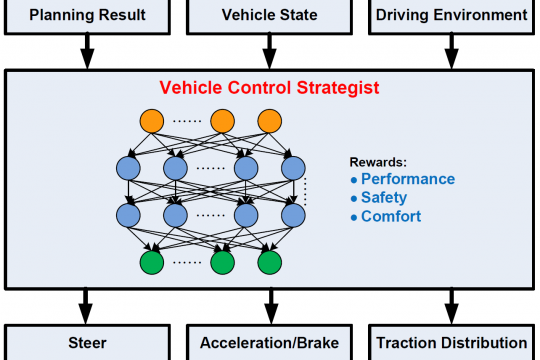
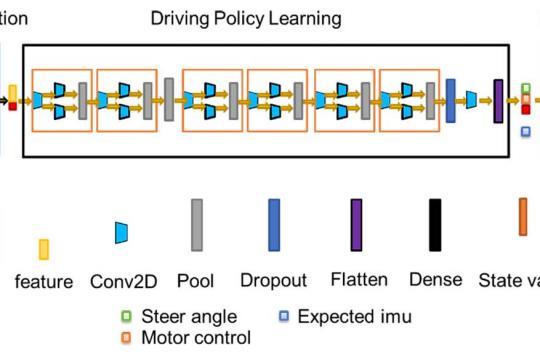
Deep Learning-Based Vehicle Control Strategist for Autonomous Vehicles
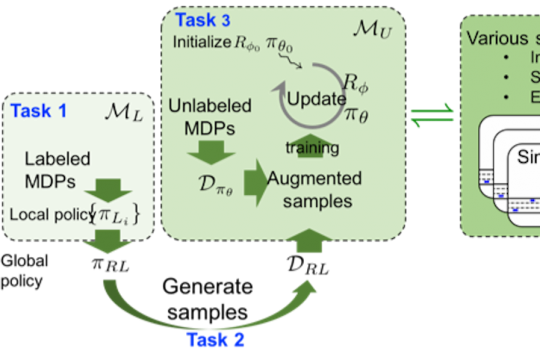
Life-Long Learning to Drive by Semi-Supervised Reinforcement Learning (SSRL)
Learning Human-Like Decision-making Behavior based on Adversarial Inverse Reinforcement Learning
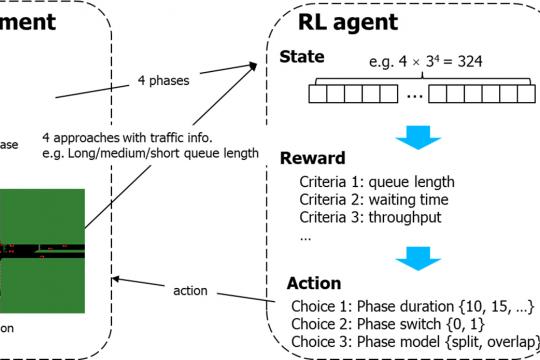
Adaptive Traffic Signal Control based on Deep Reinforcement Learning
Public-Road Demonstration of the BDD/HCE Autonomous Driving Car
Interaction and Communication Between Pedestrians and Autonomous Vehicles
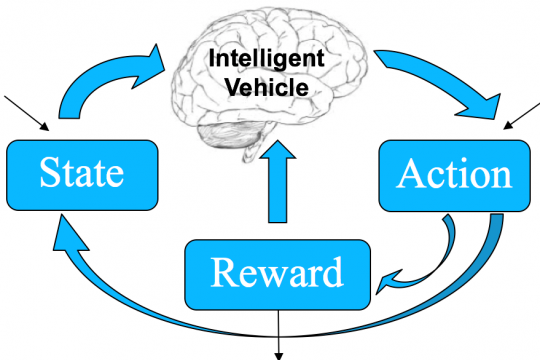
Maneuver Control based on Reinforcement Learning for Automated Vehicles in an Interactive Environment
Testing and Verification of Safe Network-Based Driving Algorithms
Pedestrian-Vehicle Interaction – Data Sets and Analysis
Exploiting Environment and In-Vehicle Information from Multi-Sensors for Autonomous Driving Policy Adaption
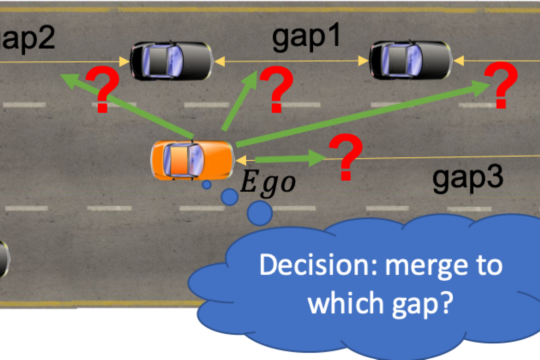
Reinforcement Learning for Automated Driving – A Use Case of Ramp Merge Automation
Infrastructure and Data 2018