Jump to navigation
Enter your keywords
Main menu
About
Projects
Researchers
Sponsors
Researcher Kurt Keutzer
Researcher Biography
http://www.eecs.berkeley.edu/Faculty/Homepages/keutzer.html
Current Projects
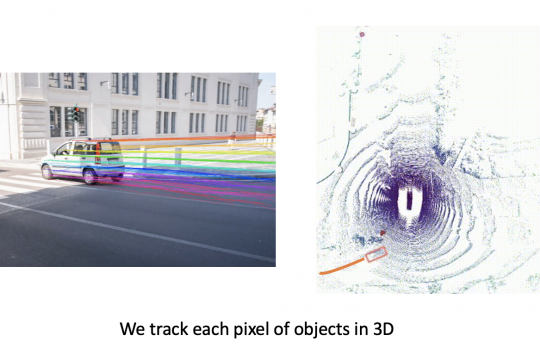
Tracking Anyone and Anycar for 3D Auto-Labeling from Video Inputs
A Unified Generative Framework for 3D Driving Scenarios
Past Projects
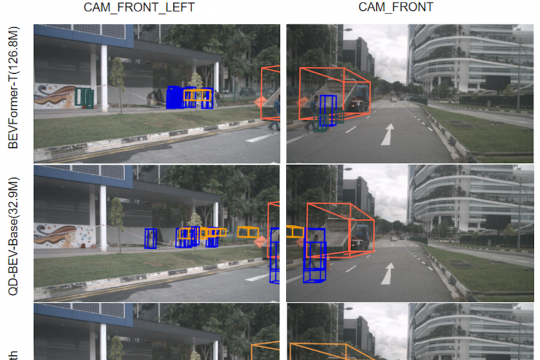
3D Object Detection Enhanced by Temporal Multi-View Input
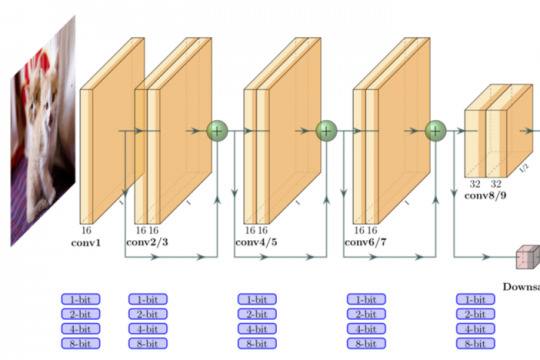
Systematic Quantization on Vision Models for Real-time and Accurate Inference in ADAS/AV
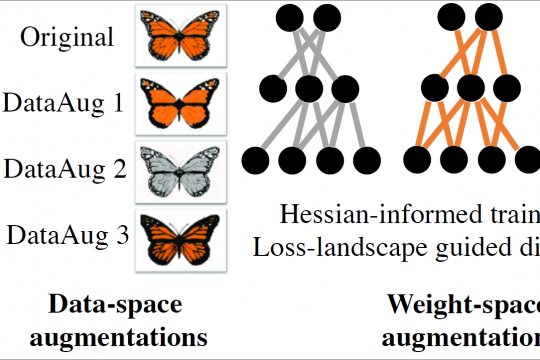
Improving OOD Generalization Through Metric-informed Weight-space Augmentation and Architecture Search
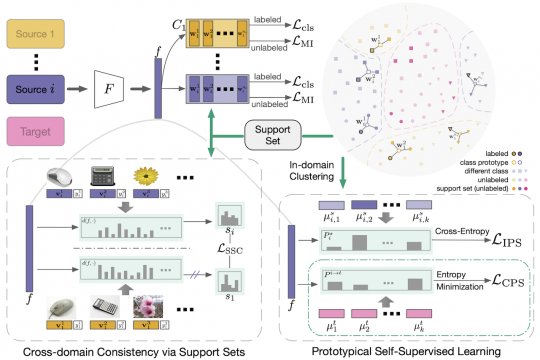
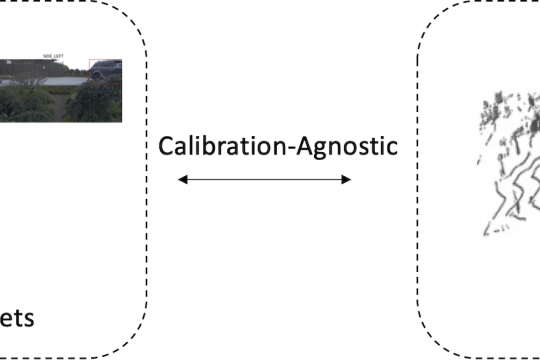
Cross-Domain Self-Supervised Learning for Adaptation and Generalization
Multi-Modal Self-Supervised Pre-training for Label-Efficient 3D Perception
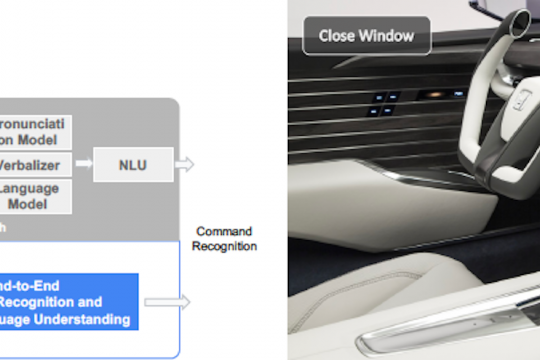
In-Car AI Assistant: Efficient End-to-End Conversational AI System
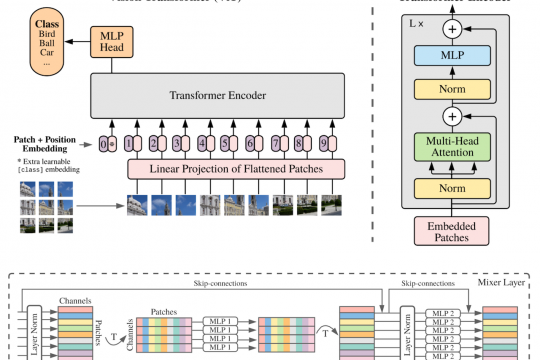
Real-time and Accurate Object Detection through Systematic Quantization of Transformer and MLP-based Computer Vision Models
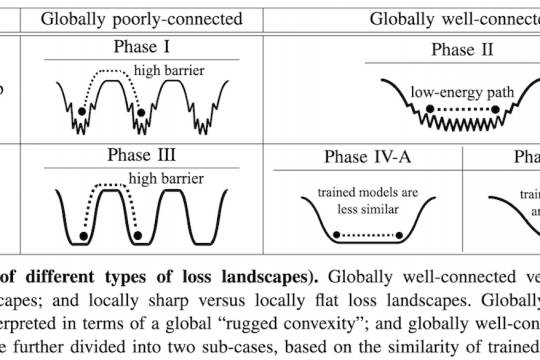
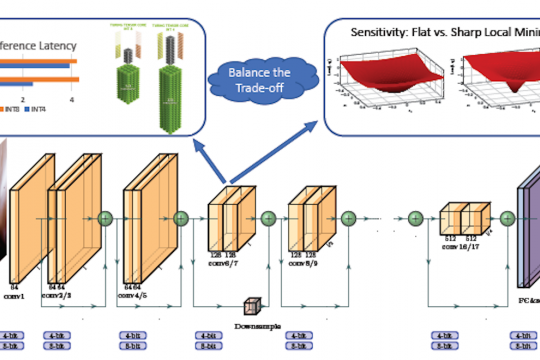
Measuring Prediction Trustworthiness and Safety Through Neural Network Loss Landscape Analysis
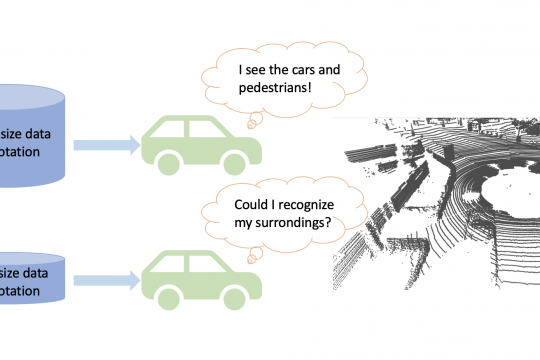
Data Efficiency for Point Cloud Perception Model
Efficient Deep Learning for ADAS/AV Through Systematic Pruning and Quantization
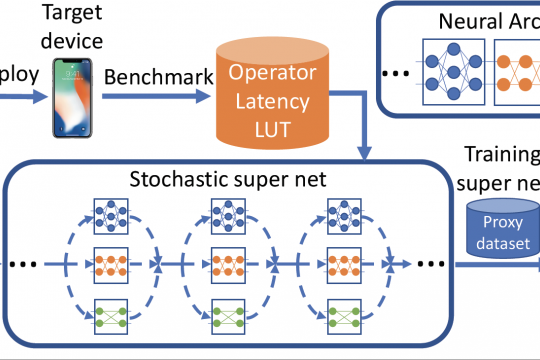
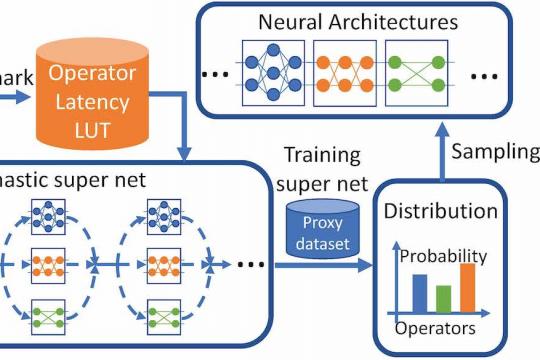
Meta Neural Architecture Search For Computer Vision
Hessian Aware Neural Cleansing: Searching for Optimal Trade-offs between Adversarial Robustness, Accuracy, and Speed
Embedded In-Car AI Assistant: Efficient End-to-End Speech Recognition and Natural Language Understanding for Command Recognition at the Edge
Unified Neural Architecture Search Framework for Computer Vision
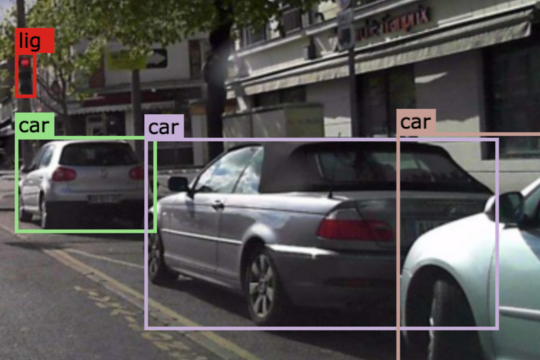
Using High-Level Structure and Context for Object Recognition
Training Data Augmentation for Autonomous Driving
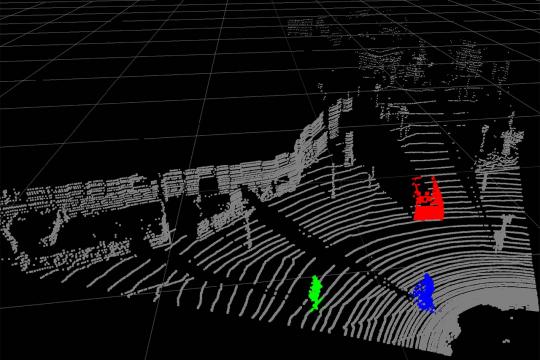
Efficient Model for Large-Scale Point Cloud Perception
Systematic Study of Neural Network Robustness Against Adversarial Attacks
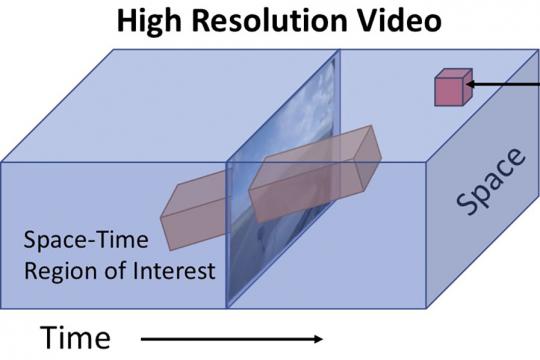
An Innovative Approach to the Dual Problems of High-Resolution Input and Video Object Detection
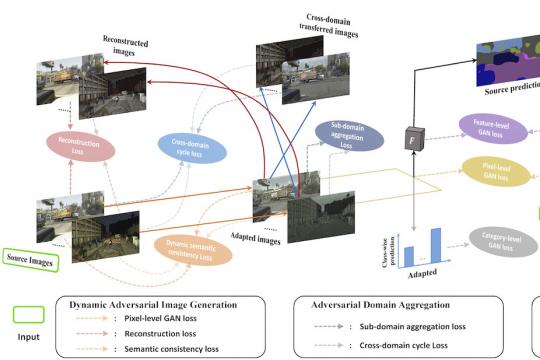
Enabling Valuable Training Data through Domain Adaptation
Automated Search for Neural Net Architectures
Embedded natural language processing for in-car speech commands
Efficient Neural Networks through Systematic Quantization
Real-time, Energy Efficient Video Object Detection and Tracking
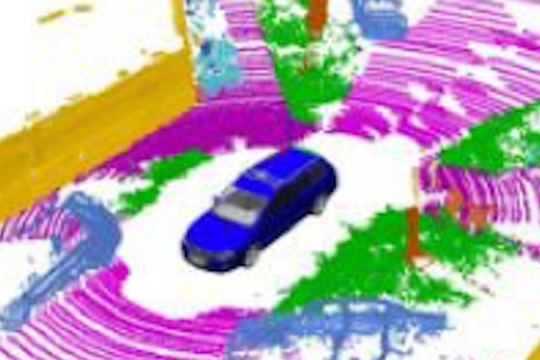
Domain Adaptation for Realistic LiDAR Data Synthesis
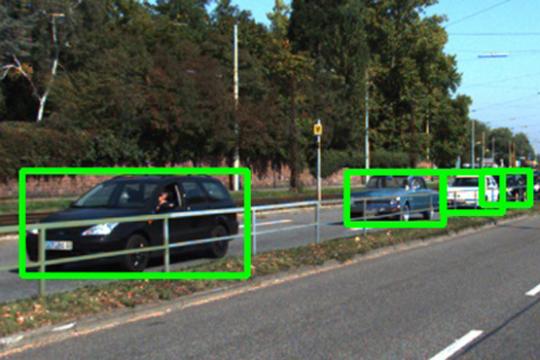
Efficient Neural Nets for Real-Time object-recognition on High-Resolution Images
Safe and Effective Learning through Formal Simulation
Energy-Efficient Deep Neural Nets for Occupancy-Grid Mapping
Design Space Exploration for Deep Neural Nets for Advanced Driver Assistance Systems